

MIT開發設計出帶觸覺軟性機械手,能靈便操作電纜線等可形變物體
MIT開發設計出帶觸覺軟性機械手,能靈便操作電纜線等可形變物體
7月14日,麻省理工大學在智能機器人行業國際性頂尖大會RSS2020上展現了一對配用高像素觸覺感應器的機械手,他們可以靈便操作電纜、電纜線等可形變物體。科學研究精英團隊稱,它是智能機器人初次在沒有別的機械設備協助的狀況下即時操作電纜。
畢業論文第一作者麻省理工大學博士研究生佘宇在接納澎湃新聞網記者采訪時詳細介紹,該機械手能夠運用于一切涉及到繩子操作的情景,例如加工廠里的尼龍繩、電纜全自動生產加工和安裝。
“潛在性的運用包含一切帶有可形變物體的操作,例如鋪被單,穿著打扮,折衣服。”
他表露,下一步科學研究精英團隊會開展更繁雜繩子的自動化技術操作,也會進行對更繁雜的可形變物體的自動化技術操作,例如衣服褲子和被單。
此項科學研究由麻省理工大學的電子信息科學和人工智能技術試驗室(CSAIL)與機械設備工程學院協作進行。
雙“手”相互配合插手機耳機線
針對智能機器人而言,即時操作例如電纜、鐵絲這類的可形變軟性物體是艱難的。由于這種軟性物體的樣子會伴隨著拖動而產生變化規律。而智能機器人的“手指頭”務必持續磁感應并調節物體的部位和健身運動。
一般,智能機器人操作電纜必須在有機械設備管束的標準下開展,即根據把繩索置放在桌子等方法,產生準靜態數據構造,減少電纜的可玩性后,智能機器人再開展操作。
而佘宇所屬精英團隊的總體目標是在沒有機械設備管束的標準下即時操作電纜。
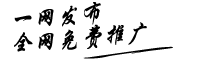
她們在公開視頻中演試了這對機械手插手機耳機線的全過程:“右手”輕輕地捏住手機耳機線的尾端,“左手”捏住手機耳機線一側并開展拖動,在認知到插口時終止并調節姿態,讓手機耳機線電源插頭指向孔距。這時“右手”手指頭相互配合松掉手機耳機線,“左手”隨著將耳機插頭插進插口。視頻顯示信息,應對操作全過程中人為因素導致的外力作用影響,機械手作出了立即調節。

機械手將耳機插頭插進插口
佘宇詳細介紹,科學研究精英團隊融合了機械結構設計、觸覺傳感技術和控制系統設計三個行業來開發設計這款機械手。而較大的閃光點取決于,在其中每一個實際研究內容都并不是非常繁雜,“可是她們融合在一起可以處理比較復雜的難題”。
掩藏在“手指尖”的觸覺感應器
在佘宇來看,怎樣有機化學地結合機械結構設計、觸覺傳感技術和控制系統設計這三個相對性單獨的行業系統軟件也是全部設計過程中最艱難的。因而,精英團隊在設計方案的每一步全過程上都持續融合、考慮到三個行業。例如,在最開始開展機械結構設計的時,她們便會考慮到事后的傳感技術和操縱設計方案難題。
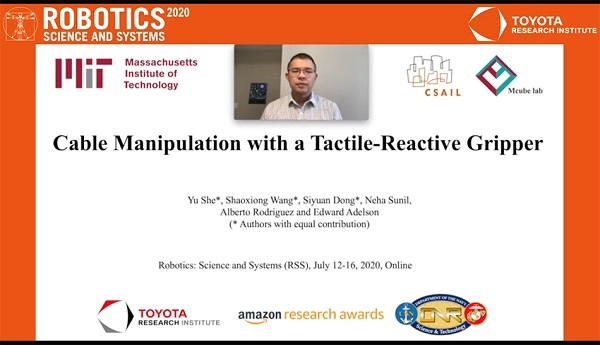
在機械結構設計層面,這款機械手關鍵由一對工裝夾具狀的兩指抓爪和機械手臂構成。二只具備力和部位操縱作用的抓爪部位相對性,并可以快速挪動。這對抓爪被安裝在機械手臂上,機械手臂也可以挪動。
機械手系統軟件
完成機械手實時跟蹤并操作電纜必須考慮多種多樣標準。最先,機械手需操縱抓物力以完成電纜在抓爪中穩定拖動;次之,機械手必須操縱其“抓物姿態”以避免電纜從抓爪的“指尖”墜落。科學研究精英團隊根據觸覺傳感技術和控制系統設計來處理這種難題。
佘宇詳細介紹,傳統式觸覺感應器的意見反饋信息內容十分比較有限,難以獲得觸碰物體的姿勢信息內容。因而,科學研究精英團隊在抓爪的“手指尖”安裝了內嵌監控攝像頭的“Gelsight”觸覺感應器。這類內嵌監控攝像頭的觸覺感應器在工作中全過程中出示了“十分高維空間”的意見反饋數據信號,包含觸碰物體的部位和姿勢信息內容。
他表明,盡管近期也是有一些機械手應用了根據照相機的觸覺感應器,“可是她們的操縱網絡帶寬極低,沒法做到同步控制”,而MIT這款機械手是專業訂制的,可以合理保證即時意見反饋。
依據感應器的信息內容,科學研究精英團隊設計方案了另外運行的2個控制板,使機械手可以機敏操作可形變的物體。一個為電纜工裝夾具控制板,用以調整抓力,使電纜可以在抓爪中穩定拖動。另一控制板為電纜姿態控制板,該控制板可以維持電纜處于抓爪“手指頭”的中間。

根據觸覺傳感技術與控制系統設計,當抓爪被安裝在機械手臂處時,可以從最開始任意抓物的部位剛開始,像人們一樣用“兩手”挪動電纜,尋找電纜的尾端。該認知和自動控制系統還可以運用于操縱別的不一樣原材料、不一樣彎曲剛度和直徑的電纜,也適用不一樣的電纜追蹤與操作速率。
將來想試著電纜走線
佘宇詳細介紹,這款機械手能夠運用于一切帶有繩子操作的情景,例如加工廠里的尼龍繩或電纜的全自動生產加工和安裝。潛在性的運用包含帶有一切可形變物體的操作,例如鋪被單、穿著打扮、折衣服等。他表明,操作可形變物體如電纜、面料等在大家的生活起居中十分廣泛,精英團隊期待智能機器人能協助人們進行這類工作中,尤其是在工作職責反復枯燥或不安全的狀況下。
現階段,這款機械手都還沒資金投入具體應用,佘宇說,如果有適合的機遇,精英團隊期待可以和公司合作推廣這款機械手。
科學研究精英團隊強調,這款機械手也有改善室內空間。她們期待可以進一步改進感應器的樣子以提升總體特性。觸覺數據信號的頻率也尚需進一步提高。
除此之外,現階段機械手的規格都還沒做到理想化情況,佘宇和他的精英團隊方案進一步變小機械手的規格來實行更為靈便的每日任務。
將來,科學研究精英團隊方案對更繁雜的繩子自動化技術操作開展科學研究,比如電纜走線和根據阻礙物插進電纜等,也會探尋更繁雜的可形變物體的自動化技術操作。










