

機器人焊接三角板與橋殼坡口焊縫的多層多道
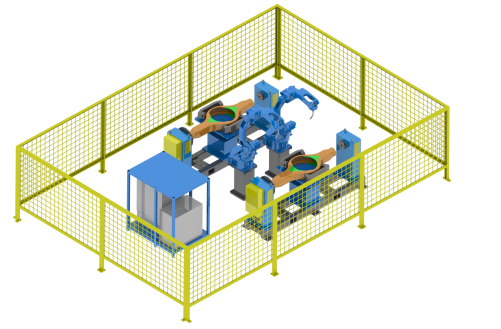
三角板機器人焊接工作站
1、焊接對象:
工序名稱:三角板與橋殼連接處“V”型的機器人焊接
工件焊前狀態: 焊前已先通過工裝點固
2、焊接工藝及方式:
l 焊接工藝:自動焊接機器人,配套超低飛濺數字脈沖焊接電源RD350,另配置TBI清槍剪絲系統,定期清理機器人焊槍。
l 焊接方式:工件位置相對固定,通過機器人自身的姿態變換完成焊縫的焊接工作;兩層及內外焊接,自動切換不同的電流、電壓、焊接速度等工藝規范。
l 生產節拍估算:約20分鐘/件(焊接3層計算;正面2層,反面1層)
3、設備組成:
設備主要由安川機器人MA1440、單軸頭尾架式伺服變位機、焊接定位夾具、清槍剪絲器、控制系統、操作盒、焊接電源(兩臺)、外圍防護系統等組成。
4、弧焊機器人控制系統:
整機控制采用集成控制柜、操作盒組合結構,操作盒具有啟動、暫停及急停等按鈕,可以外部快速控制設備的運行及停止。
5、生產工藝流程:人工將工件裝夾的伺服變位機1#工位上,液壓夾緊工件,然后按啟動——機器人自身回轉到1#工位——機器人開始焊接正面焊縫(同時進行2#工位的工件裝卸工作)——完成該面后,機器人復位,液壓夾緊松開,變位機夾緊工件,液壓夾緊工裝落下,變位機帶工件翻轉180°,液壓夾緊工裝升起,變位機松開工件,液壓夾緊工裝夾緊工件——機器人開始焊接反面焊縫——焊接完成后,機器人復位并回轉到2#工位,液壓夾緊工裝松開,人工吊下工件,焊接變位機復位,人工吊裝工件,液壓夾緊工裝夾緊工件——進入下一工作流程——依次循環
6、機器人焊接節拍計算:
焊縫總長度:200×2(條)×2(內外)×2(側)×2(面)×2(層)=6400mm
焊接時間:外焊縫3200/350=9.2min (焊接速度以350mm/min)
由于采用雙機焊所以 9.2min/2=4.6min
內焊縫1600/350=9.2min(內焊縫空間小,無法雙機焊)
輔助時間: 1.5min
機器人跳轉時間:20S
變位機變位時間:10S
節拍時間(理論):4.6min+9.2min+1.5min+30S=15.8min
實際實際: 15.8min/0.8(效率)=20min
