

FANUC發那科 M-10iA/12機器人
FANUC Robot M-10iA/12是電纜內置式機器人,分為標準型、長臂型(7L)。
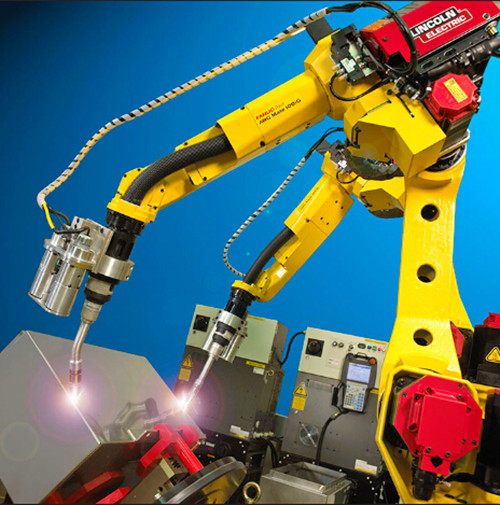
性能特點:
※通過采用高剛性的手臂和先進的伺服技術,提高了加減速性能,縮短了搬運時間,從而實現了高生產率。
※手腕軸采用了獨特的驅動機構,從而實現了苗條的電纜內置式手腕。
※機器人手腕部工具用電纜不僅被裝載在維護性能良好的單側懸臂上,還可以選用電纜配線專用軟導管(選項)。
※因為實現了機器人手腕部工具用電纜位置的穩定性,所以可以使用ROBOGUIDE(選項)進行脫機示教,從而大幅度削減示教時間。
※通過和iRVision(內置視覺功能)或力覺傳感器進行配套使用,可以使用各種新的智能化功能。
機器人型號 | FANUC M-10iA/12 | |
控制軸數 | 6軸 | |
安裝方式 | 地面、頂吊、傾斜 | |
可達半徑 | 1420mm | |
動作范圍(最 高速度) | J1軸旋轉 | 340o(230o/s) |
J2軸旋轉 | 250o(225o/s) | |
J3軸旋轉 | 445o(230o/s) | |
J4軸手腕旋轉 | 380o(430o/s) | |
J5軸手腕旋轉 | 380o(430o/s) | |
J6軸手腕旋轉 | 720o(630o/s) | |
手腕最 大負載能力 | 12Kg | |
手腕允許負載轉矩 | J4軸 | 22.0N·m |
J5軸 | 22.0N·m | |
J6軸 | 9.8N·m | |
手腕允許負載轉動慣量 | J4軸 | 0.65kg·m2 |
J5軸 | 0.65kg·m2 | |
J6軸 | 0.17kg·m2 | |
重復定位精度 | ±0.08mm | |
機器人質量 | 1530kg | |
安裝條件 | 環境濕度:通常在75%RH以下短期在95%RH以下(一個月內) 振動量: 0.5G以下 | |

