
車橋汽車零部件配件機器人焊接工作站

項目名稱: 機器人焊接工作站
需方:XXX公司
供方:常州海寶焊割有限公司

一.系統方案概述
1.1車橋機器人焊接工作站方案設計依據及準則
(1)甲方所提供的被焊車橋工件照片、3D圖紙及相關要求。
(2) 以產品的工藝分析和工藝流程的合理性為基礎,力求高柔性、高性價比、高可靠性,并且日后可擴展升級 。
1.2被焊工件及焊接要求
焊接產品為13T、16T、φ127等光橋產品,焊接前為散件。
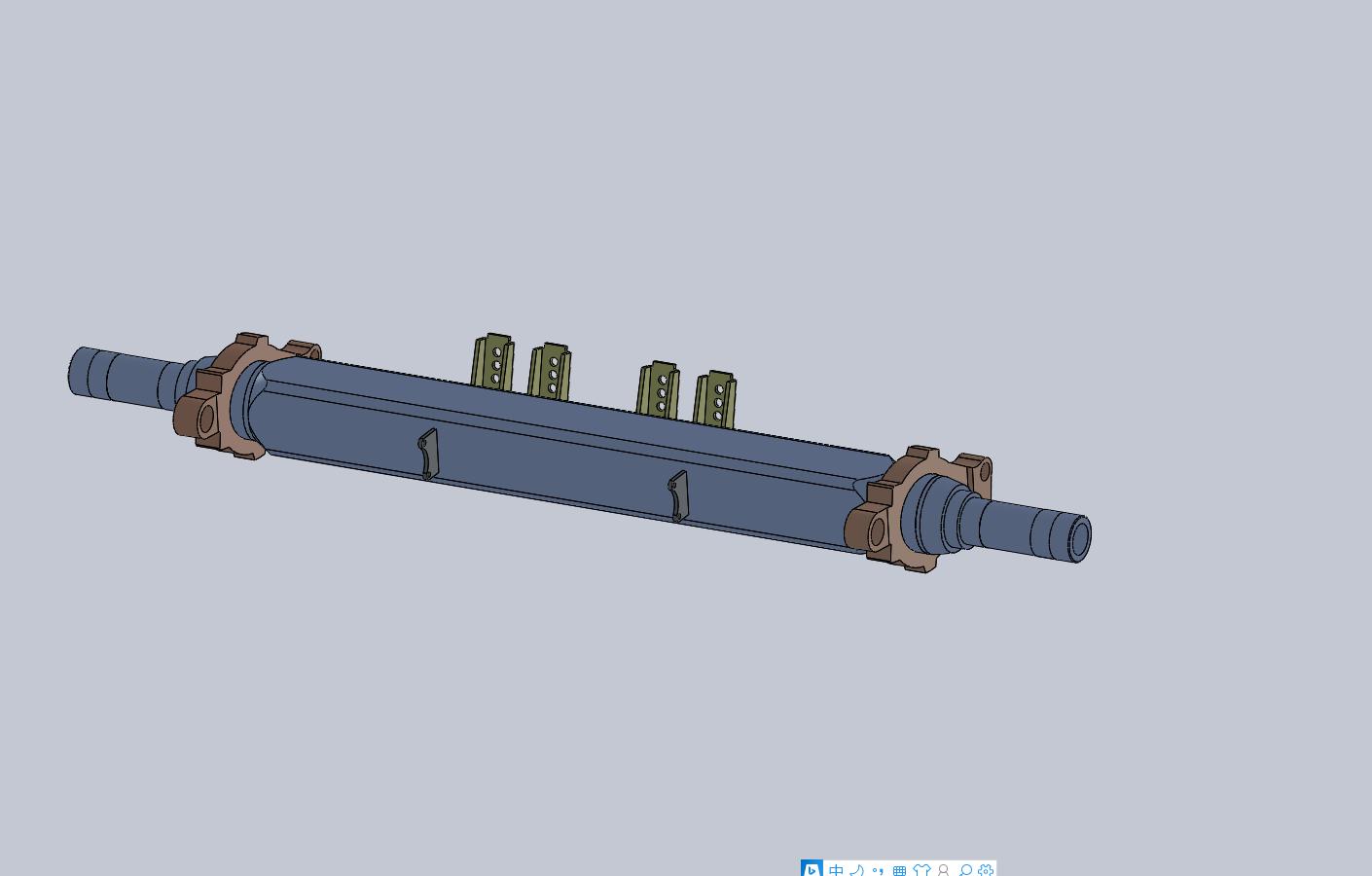
工件:13T II橋體

所需被機器人焊接的汽車焊接件的焊接要求:
(1) 機器人氣體保護焊接(MAG/CO2)。
(2) 焊接牢固,無設備自身原因導致的夾渣、裂紋、咬邊、漏焊等焊接缺陷。
(3) 焊縫均勻平整、無焊瘤等外觀缺陷。
(4) 焊縫尺寸應符合圖紙及技術要求 。
1.3工序及工藝路線的劃分
工序:
人工擺放汽車零部件至氣動夾具內→手動夾緊工件-→機器人點固工件→機器人焊接工件→ 焊接工件結束-→機器人復位→ 卸下工件 ,工件焊接程序結束。

工藝:
操作人員按下操作盒上的啟動按鈕,焊接機器人按照預先設定好的程序運行,機器人夾持焊槍到達焊縫始端開始焊接,在焊接過程中變位機可以適時轉動工件,使得工件上的焊縫有利于機器人的焊接作業,焊接結束,機器人復位,人工裝卸工件。
FANUC機器人弧焊軟件包:
FANUC機器人帶有焊縫尋位功能。該功能具備接觸傳感功能,具有自動尋找焊縫起始位置的功能,從而解決工件初始定位偏差問題。
FANUC機器人帶有電弧跟蹤功能。能夠自動補償由于工件的不一致性、焊接變形帶來的偏差。電弧跟蹤需要在擺焊和200A電流以上、角焊縫等特定要求下使用效果更佳。
機器人焊接工藝特點:通過觸碰尋位對于其中特征位置的焊縫集中進行尋位;按照工藝需求,遵循焊接應力變化、表面要求及焊接可達性要求,依次進行焊接;大部分焊縫都盡最大可能調整為船型位置。焊接過程中,部分關鍵尺寸進行必要的二次尋位,以保證起弧位置準確。并利用變位機大幅反轉的間隙,設置程序,進行清槍剪絲噴硅油的工作。
焊接工藝的分析
(1)工件參數條件
l 工件材料:碳鋼(20Mn2、Q235、Q345等)
l 焊縫形式:點焊、角焊縫、對接焊縫。
l 材料厚度:4~15mm
l 工件重量:<300Kg
(2)焊接工藝條件
l 采用CO2或熔化極富氬氣體保護焊80% Ar + 20% CO2.
l 工件不應被油、銹等污染。
l 適用焊絲:φ0.8-φ1.6(mm),同時具備φ1.2和φ1.6焊絲焊接零部件,同時具備配置盤裝和桶裝焊絲
l 保證工件的組對精度符合技術協議要求,
l 對接焊縫間隙小于1.0mm; 角接焊縫間隙小于2mm。
l 工件上不得有毛刺、浮銹、污垢等影響焊接的缺陷。
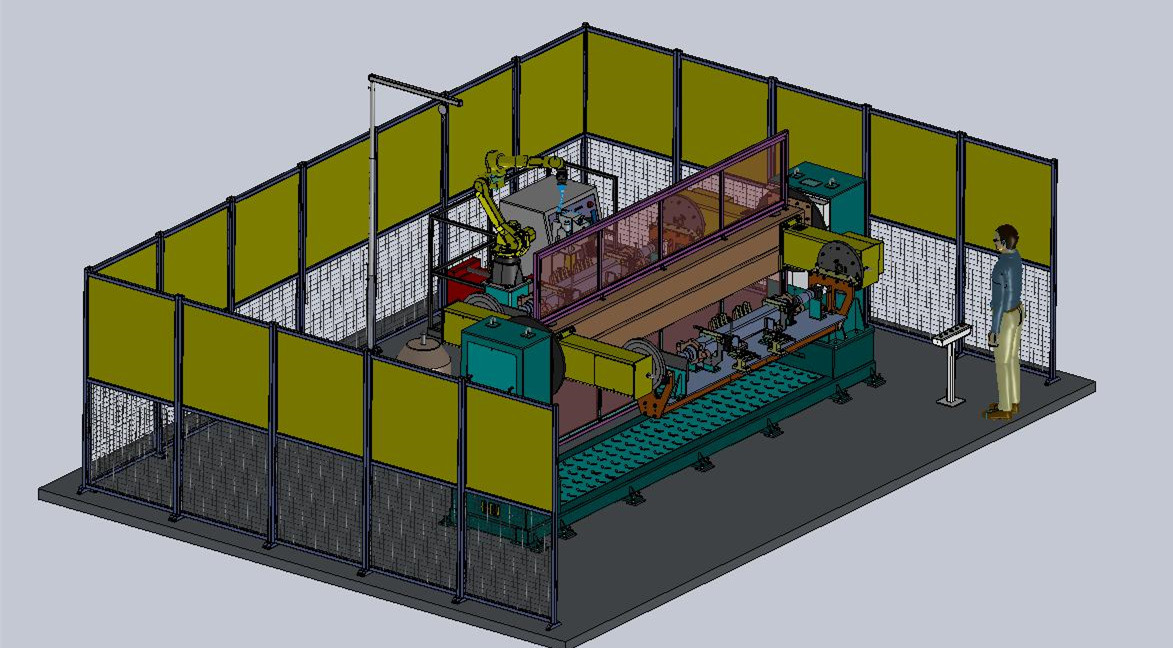
二.機器人焊接系統概述
2.1機器人自動焊接工作站的概述:
本機器人焊接系統可以24小時連續作業,跟人工作業相比,其效率、質量、穩定性等有很大提高。
根據甲方產品特點,特推薦選用弧焊機器人采用日本FANUC M-10iA/8L焊接機器人
2.2機器人焊接系統集成設備配置表
表2-1機器人焊接系統集成設備配置表
車軸-焊接機器人工作站 | |||||||
序號 | 名 稱 | 規 格 | 品 牌 | 數量 | 單位 | 備注 | |
車軸-焊接機器人工作站 | 1 | 焊接機器人(包含本體、A控制柜、示教器及集成線纜) | M-10iA/8L | FANUC(發那科) | 1 | 套 | 國外原裝進口。全球3大一線機器人品牌之一,臂展2028mm,中空臂支持內置焊槍 ,負載8Kg.A型控制柜 |
2 | 焊接電源 | SFP-P400iA | FANUC(發那科) | 1 | 臺 | 脈沖焊機,具備焊接碳鋼、不銹鋼等材料功能 | |
3 | 弧焊軟件包(起始點尋位、電弧跟蹤功能) | FANUC | 1 | 套 | 起始點尋位、電弧跟蹤功能。 | ||
4 | 機器人焊槍 | 單絲水冷,內置焊槍82W | 德國TBI | 1 | 套 | 帶夾絲功能 | |
5 | 防碰撞傳感器 | 德國TBI | 1 | 套 | 內置 | ||
6 | 循環水箱 | 保值久 | 1 | 套 | 帶水流檢測 | ||
7 | 清槍器 | MasterHyper | 1 | 套 | 清槍剪絲噴硅油 | ||
8 | X型三軸變位機 | 兩邊軸聯動式,中間軸非聯動 | MasterHyper常州海寶/FANUC | 1 | 套 | 兩邊軸聯動式,中間軸非聯動,兩邊軸負載500Kg, | |
9 | 防弧光屏 | MasterHyper常州海寶 | 1 | 套 | 安裝在變位機上 | ||
10 | 焊接夾具 | 手動夾具 | MasterHyper常州海寶 | 2 | 套 | 13T II橋體機器人用焊接夾具 ,包含夾具快換機構 | |
11 | 安全防護系統(含弧光屏式防護欄、警示燈等) | MasterHyper常州海寶 | 1 | 套 | 帶安全光柵裝置 | ||
12 | 排煙除塵設施 | 頂吸式除塵罩系統 | MasterHyper常州海寶 | 1 | 套 | 包含除塵器,頂吸式除塵罩系統、安裝結構等 | |
13 | 系統集成及控制 | MasterHyper常州海寶 | 1 | 套 | 含觸摸屏系統,一元化操作系統 | ||
14 | 安裝調試及培訓 | MasterHyper常州海寶 | 1 | 期 | |||
15 | 配件 | MasterHyper常州海寶 | 1 | 套 | |||
16 | 運輸及保險 | MasterHyper常州海寶 | 1 | 次 | |||
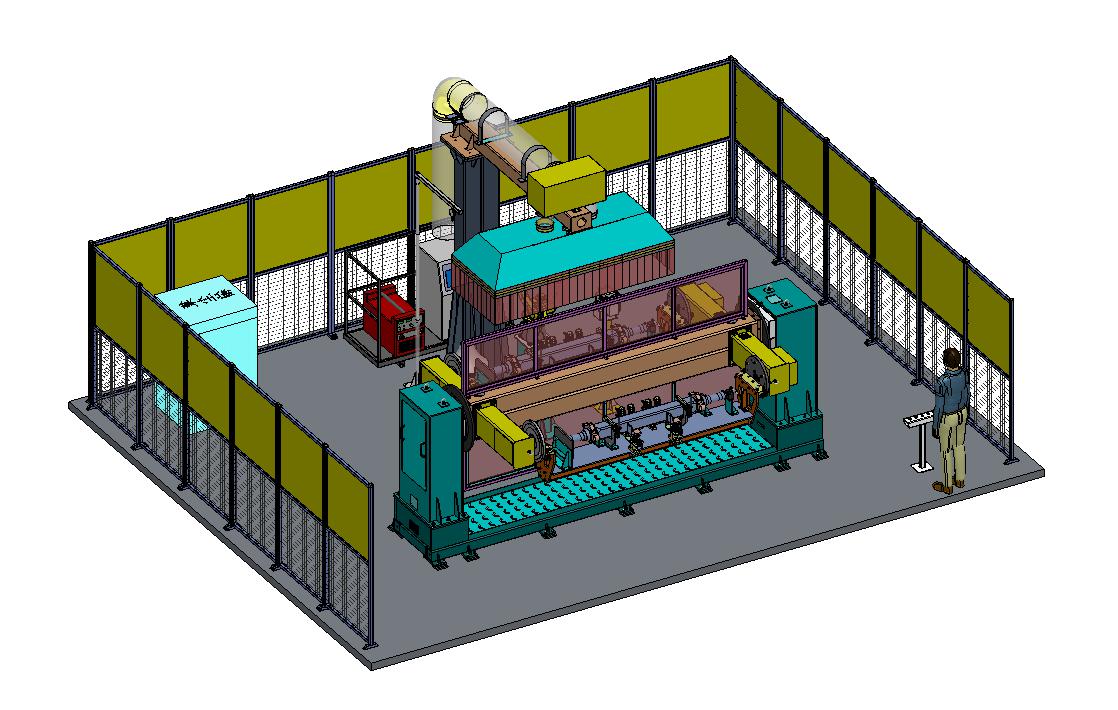
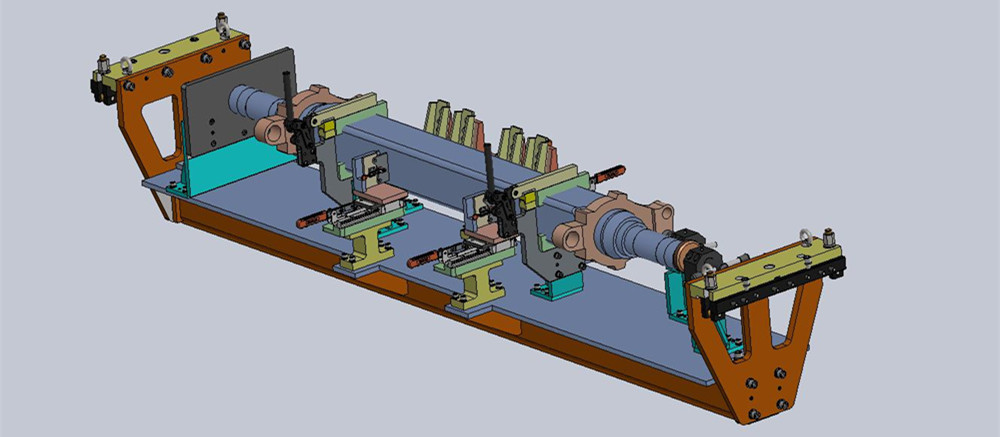
2.3設備演示圖
類似項目案例照片:

2.4 操作流程
操作流程圖見圖(2-4)。
三.機器人焊接工作站主要設備技術參數及特點說明
3.1焊接機器人
選用全球3大一線品牌之一的FANUC 焊接機器人
l FANUC機器人做為世界產量最大、產品系列最全的機器人制造商之一,擁有高精密伺服的控制技術和50多年的系統集成經驗,在北美超過50%的焊接機器人為發那科系統。
l 它也是最早落戶中國,與中國制造業分享其焊接經驗的廠家之一。
其弧焊切割機器人的優點總結為:
(1)最長使用壽命:在美國北部制造業密集的五大湖區,有相當數量的焊接機器人使用已經超過了20年,這是世界獨一無二的。
(2)安全軟控制:在每個機器人單元中,可以通過控制軟為工作區域設置一個機器人運動的安全區域,這樣可以避免機器人與設備、機器人與機器人之間產生碰撞。
(3)自適應的焊接軟件包:在電弧和激光跟蹤的配合下可以實現完全自適應焊接。
(4)高精度運動的外部軸:源自發那科機床級精密伺服的變位機,使用全進口部件,實現高精度機器人聯動,結構合理,剛性卓越,并且有自動的潤滑系統。無需人工維護,實現系統控制加潤滑油。變位機還帶有到位機械鎖死結構安全性更高。
(5)激光焊縫輔助系統: 20 年的成功經驗,成就機器人系統與激光跟蹤系統的完美結合。
(6)高速動作:市場上最快捷的機器人,高速啟停,考驗伺服控制的精度和使用壽命,這也是全球通用汽車車間采用發那科的原因。唯有自己研發伺服控制的企業才能將機器人技術演繹到如此極致。其他機器人品牌使用外部公司通用伺服電機+Windows系統,所無法比擬的。
(7)方便的鼠標連接:編程示教盒和可以插入鼠標,實現編程操作簡易。
(8)可支持8個工作組,40 個軸聯動。
(9)無級調節旋鈕:0-100%參數值無級調節與換擋調節雙模式,適用于高端系統用戶,也便利初級操作者。
(10)專家軟件庫:擴展功能:起始點尋位/ 電弧上下左右跟蹤/ 多層多道/ 收弧填充/ 斷電重啟/ 焊接橫向擺動和縱向擺動/焊縫坡口寬窄自適應等。美國最大的系統集成商30年來一直選用發那科機器人用作中厚板的弧焊,正是因為發那科的強大弧焊軟件支持。
(11)獨特的硬件可擴展性:可以擴展外部空調/穩壓器/不間斷電源,適用于特殊工況。
(12)完善的服務網絡:在中國發那科有強大的售后服務團隊,其銷量超過某些同業50倍,這也是在服務及備品價格方面的優勢。
(13)完備的培訓體系:在華北、華東、華南建有專業的焊接體驗中心和實驗室,可以隨時為客戶提供工件的實驗焊接。也可以接待多家客戶的培訓。上海發那科超過300人的工程部會是所有問題的終結地。
(14)充分的備件供應:在常州有完備的機器人的備品備件庫,可以做到及時更換機器人備件。任何的備品無需海外支援。真正是您買得起,用得實惠的機器人。
FANUC 焊接機器人:

選用發那科M-10iA/8L機器人
型號: M-10iA/8L
軸數: 6軸。
最大負載: 8KG。
重復定位精度:±0.08mm。
配置起始點尋找、電弧跟蹤及多層多道等弧焊軟件。
發那科機器人特點介紹:
FANUC M-10iA/8L 機械部分
安裝方式:地裝、吊裝、傾斜角。
關節方式:6 軸關節型
最大負荷 :8公斤
運輸方式:利用叉車或吊車
軟件
基本字庫:中英文
弧焊專用軟件
M-10iA/8L機器人控制軟件
數字伺服功能
操作指令功能
位置寄存器功能
時間計數器功能
外部程序選擇功能
高靈敏度防碰撞檢測功能
起始點尋找
手冊
軟件操作和設置手冊 (中文一冊)
M-10iA/8L的機械維修手冊 (英文一冊)
A柜控制器維修手冊 (中文一冊)
機器人型號 | M-10iA/8L | |
軸數 | 6 axes | |
最大負載 | 8kg | |
工作半徑 | 2028mm | |
運動范圍 | J1 | 5.93rad (340deg) |
J2 | 4.54rad (260deg) | |
J3 | 8.00rad (458deg) | |
J4 | 6.98rad (400deg) | |
J5 | 6.28rad (360deg) | |
J6 | 15.71rad (900deg) | |
最大運動速度 | J1 | 3.40rad/s (195deg/s) |
J2 | 3.05rad/s (175deg/s) | |
J3 | 3.14rad/s (180deg/s) | |
J4 | 6.28rad/s (360deg/s) | |
J5 | 6.28rad/s (360deg/s) | |
J6 | 9.60rad/s (550deg/s) | |
允許的負載力矩 | J4 | 44NM |
J5 | 44NM | |
J6 | 22NM | |
允許的負載慣量 | J4 | 1.04kgm2 |
J5 | 1.04kgm2 | |
J6 | 0.28kgm2 | |
重復精度 | ±0.08mm | |
防護等級 | IP54 | |
噪音 | <85dB | |
焊接機器人附加功能介紹:
●Touch Sensing焊縫自動尋找功能:
該功能是簡便有效的機器人焊縫找尋功能。工作原理:機器人通過焊機的電壓反饋,用焊絲端部碰觸工件上的兩個(或多個)基準點,來判斷工件的偏差情況,并對起弧焊接的位置坐標進行補償調整,實現焊縫起始點的自動尋找。
共包括焊接起始點傳感和終點傳感,多點傳感,焊接長度傳感,圓弧傳感以及傳感重試功能。并能在坡口內部進行傳感功能,檢測坡口幅寬變化自動調整焊槍擺動幅度及熔敷量。
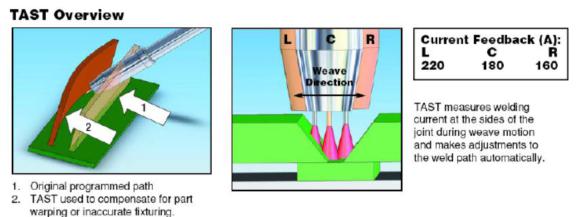
●TAST電弧焊縫自動跟蹤功能:
TAST (Through Arc Seam Tracking) 電弧焊縫自動跟蹤功能,是FANUC機器人公司開發的簡便有效的機器人焊縫跟蹤功能。采用該功能可以自動補償由于零件翹曲或裝配不精確造成的焊縫位置偏離。可以在縱向和橫向的機器人運動軌跡上,進行位置補償。
工作原理主要是通過擺動焊接過程中,檢測焊接電流的反饋信號,與設定值進行比較,調整焊接軌跡,使焊接位置始終保持在焊縫中心位置。可以用于多種焊縫接頭形式和材料。具有簡單可靠,經濟實用(不需要增加其他設備,如激光頭,紅外線傳感器等),焊槍可達性好(無附加設備,體積小),可與TouchSensing焊接自動尋縫功能等配合使用。最為重要的是它能記憶第一道焊縫跟蹤的信息,在多層焊時達到事半功倍的效果。
機器人系統具備主要功能描述:
(1)臨時停點自恢復:焊接過程中發生氣流量異常、焊絲用完和暫時停止時,排除故障后可直接調用“繼續上次焊接”命令,機器人可從任意位置自動到暫停的位置繼續進行焊接。
(2)接觸傳感和焊縫尋位功能:在工件焊接變形或組對不準確時,可通過焊絲與工件的碰觸,實現高精度焊縫起始點尋位,并具有焊縫跟蹤和多層多道焊接功能。
(3)具備收弧填充/ 斷電重啟/ 焊接擺動/焊縫坡口寬窄自適應/刮擦起弧等功能。
(4)粘絲自動解除功能:在焊接結束時(電弧OFF命令執行時),出現焊絲粘在工件上的情況下,自動熔斷焊絲(再給上電弧)解除粘絲狀態,繼續運轉,并可以設置接觸次數。
(5)機器人支持內置焊槍的安裝,前臂為中空結構,可以實現線纜內置,避免干涉。
(6)專家數據庫:通過在程序中設定必要的焊接條件,系統可自動完成排焊道和相應焊接參數調整。
(7)示教編程:配置大屏幕彩色背光液晶顯示屏示教器,具有參數在線修改和故障自診斷顯示功能,實現便捷現場編程。
(8)故障自診斷:焊機和機器人對各種突發情況進行判斷,并嘗試自動修復,不能自動修復的故障通過顯示故障代碼提供相關故障信息。
(9)具有程序編輯、變換、呼出功能以及示教/再生切換功能。設備安裝時應提供安裝作業指導書,保證實現未來再增加相同設備時所需要的程序復制、平移和鏡像等功能,不需要重新編輯程序,簡化示教。
(10)具有開放式接口,可通過數字接口與國內外主流焊接設備、清槍剪絲機構等進行信號和數據的交換。
(11)機器人具備后續升級擴展能力,可擴展100個I/O接口以備后續升級。
3.2焊接電源
FANUC SmartPower SFP-P400iA專為機器人和自動化焊接設計的機型,根據客戶的特定需要提供定制不同的功能。
組成部分:FANUC SmartPower SFP-P400iA焊接系統由焊接電源,送絲機等組成。
本套送絲機是獨立小巧的填充焊絲的送絲機,可輕松伴隨焊接機器人的機械臂一起移動。
FANUC SmartPower SFP-P400iA為數字化焊機,和FANUC機器人的先進數字化控制系統實現對接通訊,接線簡單,通訊速度快,編程操作簡化。
焊機特點:
快速通信能力顯著地增加了機器人焊機的焊接效率。
性能可靠的送絲機構減少了故障次數。
輕便小巧的送絲裝置可隨機械臂輕松擺動。
記憶通道和焊接程序方便編寫機器人操作程序。
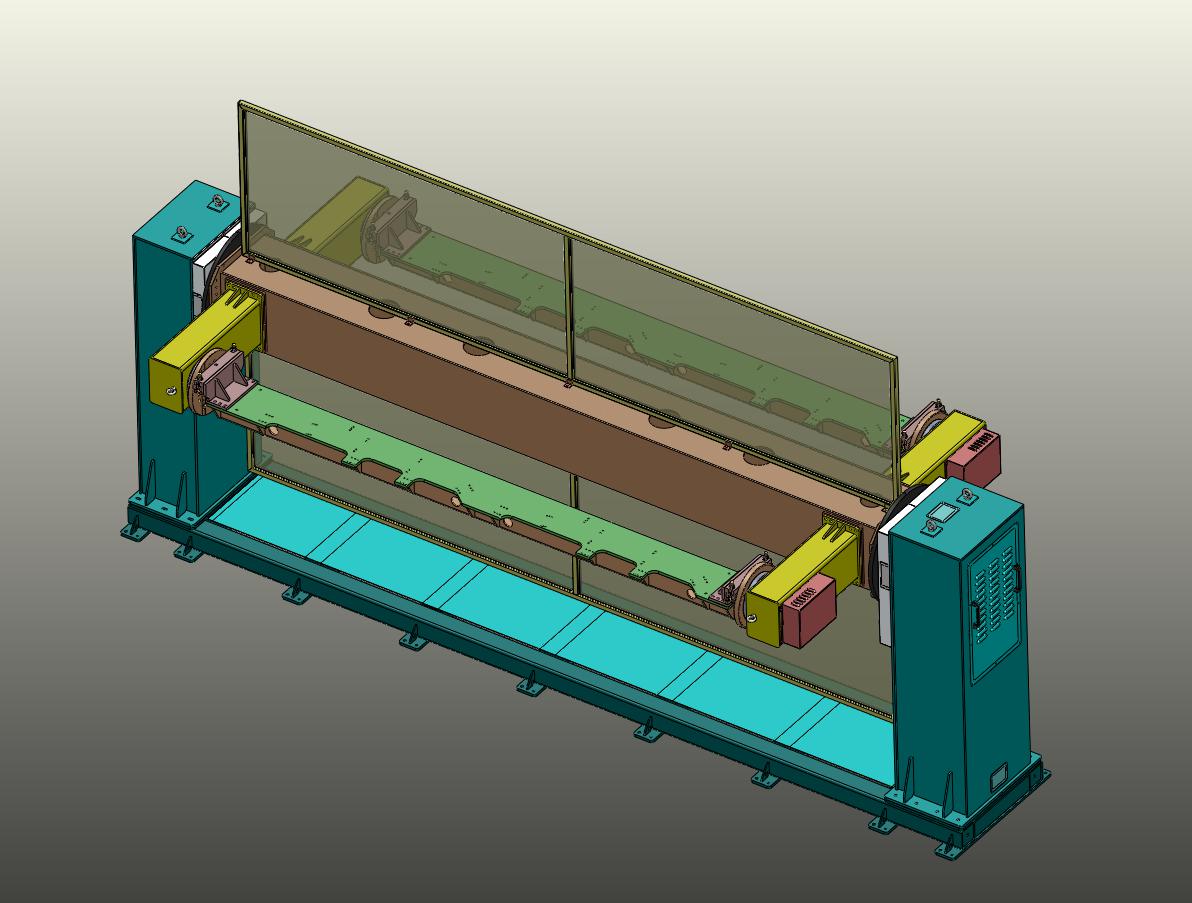
3.3焊接變位機
兩邊軸聯動式,中間軸非聯動
焊接變位機是焊接夾具的載體,通過變位機的轉動帶動工件變換位置,以便于機器人的焊接。
焊接變位機回轉運動由伺服電機、帝人減速機、電氣系統控制等部分組成,可實現多種工件的自動翻轉。
變位機主要參數:
項目 | 參數 |
最大負載 | 500kg |
翻轉范圍 | 360° |
最大翻轉速度 | 16°/sec |
最大翻轉半徑 | 500mm 具體以設計為準 |
兩法蘭間距 | 2500mm 具體以設計為準 |
此變位機的最大負載為500Kg,可以焊接工件和工裝夾具的總重量為500Kg以內的產品。
3.4機器人焊槍
選用TBI水冷內置焊槍(帶夾絲功能)
3.5防碰撞傳感器
選用全球頂級品牌德國TBI 防碰撞器。焊槍依靠預載彈簧實現準確定位,在碰撞發生時,彈簧彎曲后啟動開關,機器人立即停止運行并報警。由于碰撞脫離機構的屈從設計,碰撞發生后不需要對焊槍重新校驗。
優點介紹:
l 精度高 /High precision;
l 重復性好/Good repeatability;
l 微電安全開關 /Micro electrical safety switch;
l 重量輕/Light weight;
l 體積小/Small volume
3.6清槍剪絲裝置
清槍剪絲裝置對于機器人上長時間進行焊接的焊槍來說,是非常必要的。進行剪絲清嘴時,一般編制一個專門的程序。當焊槍到達剪絲位置后,自動控制送絲及剪絲動作。當焊槍到達清嘴位時,開關檢測焊槍是否到位,鎖定焊槍后,由氣缸推動旋轉刀片對噴嘴內部粘附的飛濺進行清理, 并向噴嘴內部噴射硅油,避免焊接時飛濺的牢固粘附。保證機器人系統長時間連續無監視運轉。
該裝置放在機器人的一側。機器人可以最舒適的姿態進行剪絲和清嘴。
清理的頻率取決于不同的條件,如:工藝過程、氣體類型、材料類型、和它的表面等;程序員在機器人控制器中的工作程序中確定清理程序的頻率。
3.7工裝夾具(手動夾具)
工裝夾具具有快速切換工裝功能,小工裝快換時間在3分以內,大工裝快換時間在5分鐘以內完成快換。
工裝快速換型細節:一級工裝與二級工裝配合,實現快速換型
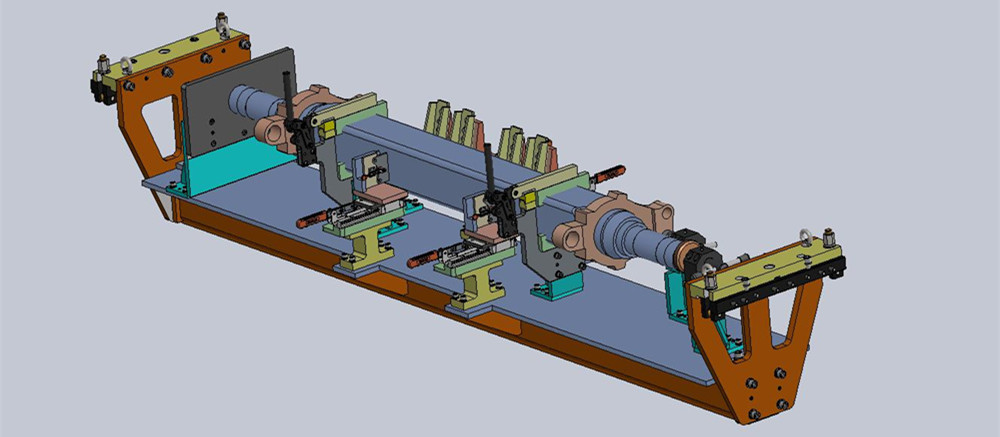
工裝夾具示意圖:
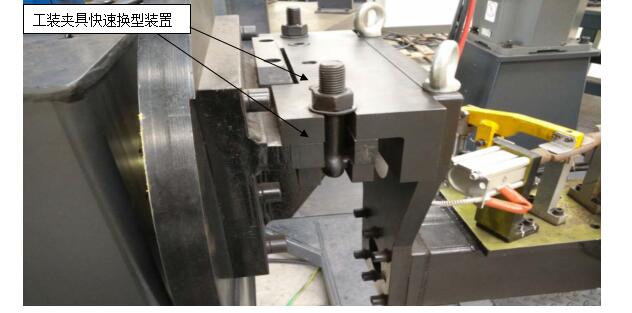
該工裝夾具為手動夾緊工裝,人工擺放零部件以后,機器人點固,機器人焊接。
設計時考慮操作者的人機工程學、三坐標檢測的可行性,焊接夾具應動作迅速、操作方便,并確保操作者的安全。
工裝夾具上的結構件通用性好,備件可以通用。
工裝夾具具有工裝快換防錯接口,可以與其他產品的工作站切換工裝共用機器人工作站。
工件放在工裝上有防錯結構防止工件放反。
工裝夾具仿真軟件模擬焊接,防止后期工裝有干涉。
工裝夾具上的定位銷和托塊三方向或單方向可調
3.8排煙除塵設施
本套系統采用低負壓頂置罩式除塵方式,主要有除塵罩、皮簾、支撐機構、除塵軟管、低負壓除塵器等組成。
除塵器:
3.9安全防護
安全防護由弧光屏式圍欄和安全光柵組成,達到人機分離的目的。
3.8集成控制系統
本套系統包含觸摸屏系統。
保護氣體流量檢測功能:當保護氣體無法及時提供時,機器人工作站自動識別并暫停動作,以避免因無保護氣體而使焊縫產生氣孔等缺陷。
水箱故障檢測功能:當水箱液位不足或有異常時,機器人工作站暫停工作,以避免焊槍因無水冷卻而損壞。
系統主控部分采用可編程控制器作為主控單元,人機界面顯示工作狀態,具有“手動”、“自動”選擇功能,在“手動” 模式下可以人工參與,在“自動”模式下設備通過操作臺啟動對應的工位,自動完成焊接操作。并且設有:電源開/關及指 示按鈕;急停按鈕,當發生意外時可緊急停止。控制系統的其它電氣元件如繼電器、開關和按鈕等器件,均采用中外合資生 產或國內知名產品。
控制系統由機器人系統、外部軸系統與焊接系統組成,幾者之間通過通信接口進行通信及相關動作的鏈接,共同完成對工件的焊接工作。
整個系統通過單元觸摸屏操作臺來啟動,當焊接完成需要清理焊槍時,機器人可自動運動到清槍器位置自動清理焊槍,機器人通過總線與焊機連接,可控制焊機的啟停,焊接參數的調用通過程序號來實現。設備全程由機器人來控制,焊接工藝和流程需要通過示教者來編譯規劃。
四.設備技術條件
(1)設備工作環境
l 供電電源:380V±10% ,50HZ±1% ;
l 工作環境溫度:0~45 0C
l 工作環境濕度:≤95%
l 壓縮空氣:0.4~0.8Mpa (需濾出水、油)
l 空氣介質:無腐蝕性介質,無粉塵
l 地基穩定性:良好,混凝土深度不小于200mm
(2)設備用途及總體要求
l 機器人焊接系統滿足約定型號參數范圍內客戶工件焊接要求 。
(3)總體要求
l 設備設計合理,具有足夠強度、剛性,滿載運行后不得產生塑性變形,造型美觀,制作細致;
l 具有良好的操作性能,維護、維修方便,較高的安全性和全面的防護措施,不對環境產生噪聲、污水等,符合國家有關安全、環保標準;
l 運行時不得有沖擊及異因現象;
l 主要配套件均采用國內知名品牌或外資品牌,保證質量及使用性能;
(4)設備顏色
按我公司標準顏色(客戶指定的除外)
(5)設備結構及外觀
該機器人焊接系統的結構設計.全部采用CAD計算機輔助設計;各關鍵部件及主要運動配合均進行了應力分析及計算機模擬。機座和底座選用先進的加工工藝,各個焊接結構件均做退火處理,為整機結構提供了堅實的保證。同時,設備的關鍵部件均由加工中心一次加工成型;關鍵件選用進口材料;主要軸承及電氣件選用國內外知名品牌。
設備外觀檢驗標準:表面不可有掉漆、留痕、氣泡等缺陷,表面油漆不可有劃痕等現象(A級面目光停留5秒鐘,B 級面目光停留2秒鐘,沒有明顯缺陷)
各焊接處焊縫牢固,可靠,無明顯的焊瘤氣孔等缺陷,外觀A/B 級面的外觀無明顯的氣切割鋸齒,斜面等缺陷,C級面無明顯毛刺。所有外漏面不應有尖角毛刺等缺陷 。
各裝配螺栓按照設計要求扭力擰緊,有清晰的禁錮后標示線 。各裝配螺栓無滑絲等現象。
詳細,請參考我司產品出廠檢驗標準和設備外觀檢驗標準國標;
五.技術資料
(1)機械、電氣、操作使用、維護保養說明書以及《機器人系統操作指導》、《作業指導書》、(含機器人系統、軟件編程等相關資料)1套。
(2)安裝、維修用部件圖紙1套(含地基圖、設備總圖等)。
(3)外購配套件的全部技術資料1套(中文版)。
(4)提供易損件、消耗品和專用工具清單,交貨時應提供以上提到的相應備件和工具。
六.安裝、調試及驗收
設備交貨期:合同簽訂后30天
(1)調試分預驗收前調試和終驗收前調試。
(2)預驗收前調試在賣方工廠進行,有賣方負責。
(3)設備安裝和終驗收前調試:賣方負責在買方指定的工作現場進行該設備的調試,賣方在接到買方具備安裝調試條件書面通知后,派員到買方指定的地點進行安裝調試,買方派員配合及提供所需的風、水、電、氣等設施,設備在安裝調試完成后,確認滿足買方自己的調試需求和認可方可離開買方現場。
(4)賣方安裝調試人員應遵守買方要求的安全管理規定,對自身安全行為負責。
(5)驗收
設備驗收分兩部分,即設備在賣方工廠的預驗收和在買方現場的終驗收。
預驗收和終驗收的標準和技術條件:
l 雙方簽訂的合同
l 本技術協議
l 設備的設計全體圖
l 其它驗收條件:
l 設備調試后應啟停運行平穩、無異音等明顯異常,各部位運行良好。
l 滿足設計焊接要求,電機減速機無明顯噪聲,不過熱、無漏油。
l 工裝夾具滿足工件定位裝夾要求,定位準確,裝夾穩定無松動。
l 正常生產30件工件,滿足焊接要求。
(6)完成驗收
終驗收時,買方應有技術人員在現場協助,最終驗收完成,雙方簽訂終驗收報告,設備交付完成。
如果因為買賣雙方任何一方的不可預測原因而導致最終驗收不可進行時,雙方簽署階段性驗收報告。
設備到廠壹個月內,因買方原因(如不具備生產條件、沒有可生產工件等)不能進行終驗收工作,則賣方即視該設備通過了甲方驗收,甲方即應為乙方辦理終驗收手續,并根據合同進行付款結算。
七、雙方職責
7.1.買方職責
(1)提供賣方設計所需產品資料和提出工藝對設備要求。
(2)按期并保證施工質量完成設備基礎施工。
(3)為賣方在買方指定現場對設備安裝調試提供必要的條件。
(4)主持設備的驗收。
(5)按合同要求,及時支付各期款項。
(6)乙方完成詳細設計后,由甲乙雙方對設計圖紙審查會簽。
買方向賣方提供以下必要文件:
(1)滿足賣方設計所需的完整工件圖紙。合同簽訂前。
(2)賣方為買方技術保密不向第三方提供或轉讓買方提交給賣方的任何圖紙和技術資料。并簽署保密協議(如買方要求)。
7.2賣方職責
(1)了解需方工件特點及生產工藝要求。
(2)設計全套設備和工裝夾具圖紙,對機械設備設計的可行性承擔責任。
(3)對該套設備的設計、制造、安裝、調試、人員培訓等提供服務,細節如下:
l 非標設備的加工、制作、安裝;
l 外購件的采購、安裝,并對外購件的質量負責;
l 設備安裝所需各種部件的制作;
l 配合買方的設施基礎施工;
l 負責給買方推薦的技術人員和維修人員等做培訓;
l 完善的售后服務支持;
l 產品包裝、運輸及保險;
l 參與設備驗收,提供設備驗收資料等技術文件,及時辦理驗收手續;
賣方交貨后,需向買方提供下列文件:
八、技術培訓與技術支持
1.培訓:為使買方掌握操作和維修保養該設備,設備在買方現場進行安裝調試工作時,買方維護、操作等技術人員同時參與此項工作,在設備終檢驗收合格后,賣方技術人員需至少提供5個工作日以內的設備使用和維修的培訓。
賣方工廠培訓
A. 賣方提供培訓計劃,由買方設備工程師認可,培訓課程包括設備的操作、機械結構、電氣、氣動及日常維護保養和故障診斷;
B.培訓在設備的預驗收時進行;
C.培訓時間:2~5人一周;
D.培訓費用:免費。
E. 賣方提供工作午餐,住宿及交通費由甲方負責
買方工廠現場培訓
A. 賣方提供培訓計劃,由買方設備工程師認可,培訓課程包括設備的操作、機械結構、電氣、氣動及日常維護保養和故障診斷;
B.培訓在設備的終驗收前進行;
C.培訓時間:2~5人一周;
D.培訓費用:免費。
2.技術支持:設備保質期為一年,質保期從終檢完成后開始計算。
3.售后服務:設備過質保期后,賣方對該設備提供終身技術支持和服務以及優先的備件供應。質保期 滿后,賣方對該套設備實行終身服務,且只收取必要的成本費用。
4.質量保證:
屬正常使用狀態下發生的故障,對屬于賣方責任且在質保期內的,設備可返回賣方工廠或賣方在買方工廠無償維修或部件更換(買方實施了設備《維護保養指導書》所記載的維護保養內容為前提)。賣方所指認的易損件、消耗品、維護部件及保險絲(管)、指示燈等屬于易耗品的不在此項,請予以理解 。
設備在質保期內出現故障,買方應以書面通知賣方并詳細描述故障表現。賣方承諾在工作日4小時內予以回復,如必要(國內)1個工作日內到達買方現場解決(特殊情況的另行溝通)。
5.免除事項:
下列情況不在賣方保修范圍內:
l 由于未進行正常的保養、維護及定期檢查而發生的故障;
l 由于天災或其它不可抗力而受到的損害;
l 由于本系統以外的異常而發生的故障;
l 由于買方誤操作等不屬于賣方責任而引起的故障;
6.安全注意事項:
(1)使用本設備前,請仔細閱讀設備使用說明書,以便正確操作。
(2)為確保安全,使用本設備前,請切實實施本說明書要求的買方所負責范圍內的連接工程、接地工程等,再進行操作。
九、其它
本方案書中所涉及的技術細節,已由常州海寶加特航空自動化(常州)有限公司在中國申請專利。未經授權,請勿向第三方傳播以上信息。謝謝!
海寶的優勢
10.1、我們有實體制造工廠:
常州海寶,坐落于常州市,占地92畝,其中車間面積接近2萬平米,公司集研發設計。生產制造、銷售售后、技術支持、各類焊接試驗、機器人保養等業務于一體。其中生產環節集下料、焊接、打磨、機加工、電裝、調試、表面處理等于一體的綜合能力。

10.2、機器人系統硬件:
u10.2. 1.選用發那科原裝進口中空臂機器人 ;u
10.2. 2. 選用機器人專用焊接電源:
選用焊接電源,無縫連接,焊接性能優越,最大特點為超長的使用壽命和穩定的性能。
10.2.3.焊槍:
選用德國焊槍,暫載率高,可靠性高。
10.2 .4.減速機及伺服電機:
選用RV式減速機,全球第一品牌日本帝人RV減速機。電機均采用高精密伺服電機。
10.2 .5.觸摸屏及電氣元器件:觸摸屏選用全球第一的Pro-Face, 電氣元器件均采用西門子或施耐德等國際一流品牌的部件,確保整個控制系統長期使用的穩定性。
10.3.售后服務:
依托MasterHyper常州工廠強大的加工制造能力和有利的技術團隊保障,同時常州海寶作為發那科北方戰略合作伙伴,公司備品備件充足,無需長時間等待大部件的采購周期,真正做到無停產,保障客戶正常生產。機器人自動化設備有別于其他標準設備,機器人設備后期如有人為誤操作導致機器人停機情況,常州海寶可以保證1天之內到達客戶工廠服務。
10.4.交期:
依托常州工廠(92畝地)強大的加工能力和有利的技術保障,無論從設計周期、制造周期和關鍵零部件的庫存情況,具備應對突發事件的能力。
10.5、公司資質:
10.5.1.發那科機器人中國區最大機器人集成商和經銷商。
10.5.2.美國林肯各項資質:
(1)美國林肯OEM供應商
(2)美國林肯自動化設備供貨商(整套機器人集成系統及設備)。
(3)美國林肯自動化焊接電源設備經銷商。