 |
|
機器人焊接防撞梁
 發聯系信
發聯系信- 產品詳情

工業焊接機器人已經投入到各行各業中運用,它不僅能夠將焊接質量提升到更高的等級,還能將工作人員從惡劣的作業環境中解放出來,同時提高生產效率。而實現這一切的關鍵在于我們如何正確挑選工業焊接機器人。
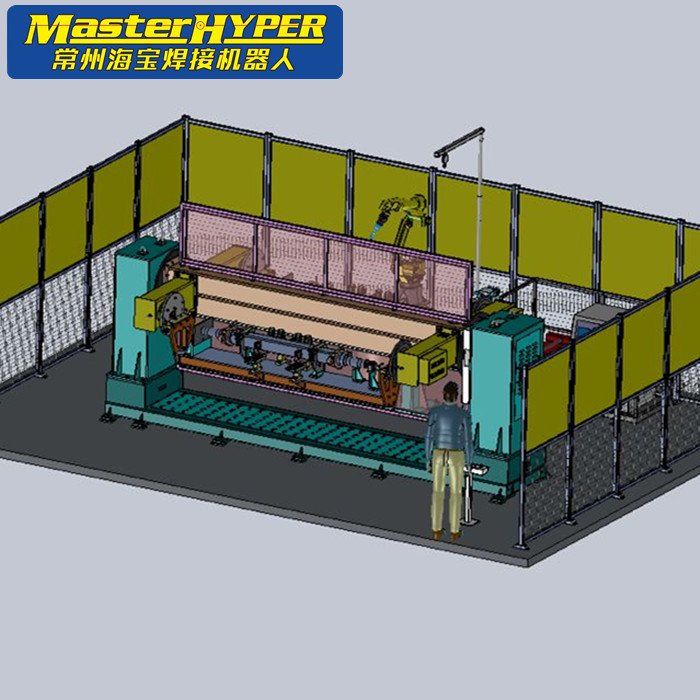
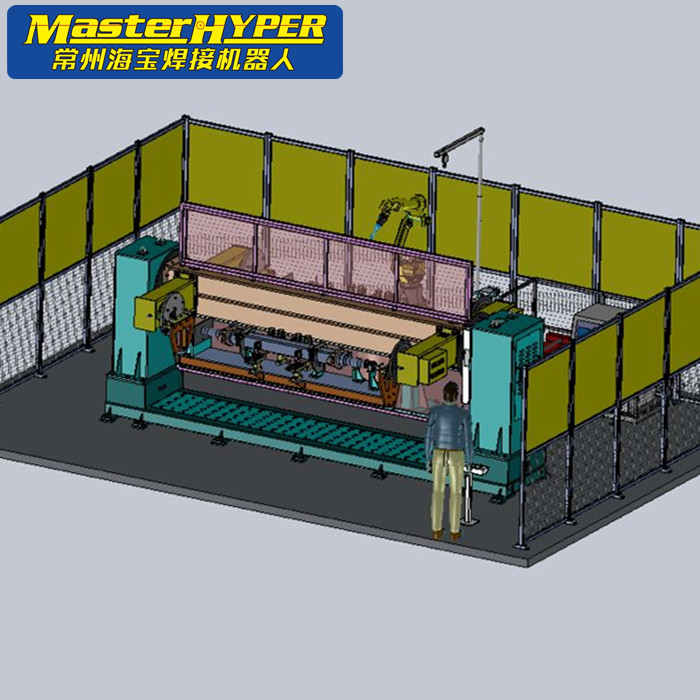
焊接機器人是一臺獨立自動化焊接設備的話,那焊接機器人工作站就是由各種單元構成的一整套機組,為完成焊接操作提供完善的功能。下面簡單了解一下焊接機器人工作站的構成部分有哪些?
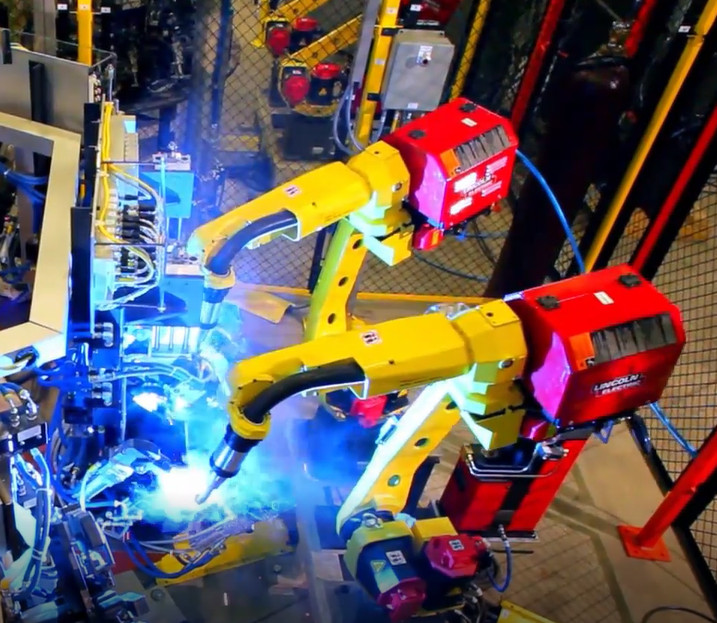
首先當然是核心部件之焊接機器人單元,一般的焊接機器人是由示教盒、控制盤、機器人本體及自動送絲裝置、焊接電源等部分組成。可以在計算機的控制下實現連續軌跡控制和點位控制。
不僅如此,它還可以利用直線插補和圓弧插補功能,來焊接由直線及圓弧所組成的空間焊縫,功能十分強大。焊接機器人主要有熔化極焊接作業和非熔化極焊接作業兩種類型,不僅可以長期進行焊接作業,還能保證焊接作業的高生產率、高質量和高穩定性等特點。
其次是電源單元和焊槍單元,都是焊接機器人工作站運行的基礎;同時還有外部軸單元或焊接工作臺,比如伺服行走滑臺、伺服變位機、固定工作臺、氣動變位機、旋轉臺等多種方式,滿足不同的工況。

除此之外,焊接機器人工作站還有夾具單元,用以固定工件,常用的有全自動電控夾具、手動閥氣動夾具、手動夾具等;安裝結構單元,負責焊接機器人工作站的牢固穩定,有機器人底座或整體方便移動式大底板。
另外,由PLC電氣控制、操作控制臺、啟動按鈕盒等構成的電氣控制單元;安全防護單元;自動清槍站;安全工作房等也都是焊接機器人工作站不可或缺的組成部分。
首先是根據焊接所需的作業空間確定工業焊接機器人可以達到的作業空間,一般后者要大于前者是,為前者則是有焊點方位和實際焊點數量決定的,它們之間有著密切的關系。
其次作為工業焊接機器人,它的點焊速度與出產線速度相匹配,為了達到這一標準,應先由出產線速度及待焊點數斷定單點作業時刻,而機器人的單點焊接時刻有必要小于此值。
挑選工業焊接機器人的時候,還將涉及到焊槍的挑選,以往都是按照工件形狀、品種、焊縫方位選用。筆直及近于筆直的焊縫選C形焊槍,水平及水平傾斜的焊縫選用K形焊槍。
當需選用多臺工業焊接機器人的前提下,應研究一下是不是選用多品種型,并與多點焊機及簡易直角坐標機器人并用等問題。當機器人之間的距離較小時,應留意動作次序的組織,可通過群控或相互間聯鎖效果防止干預。