|
|
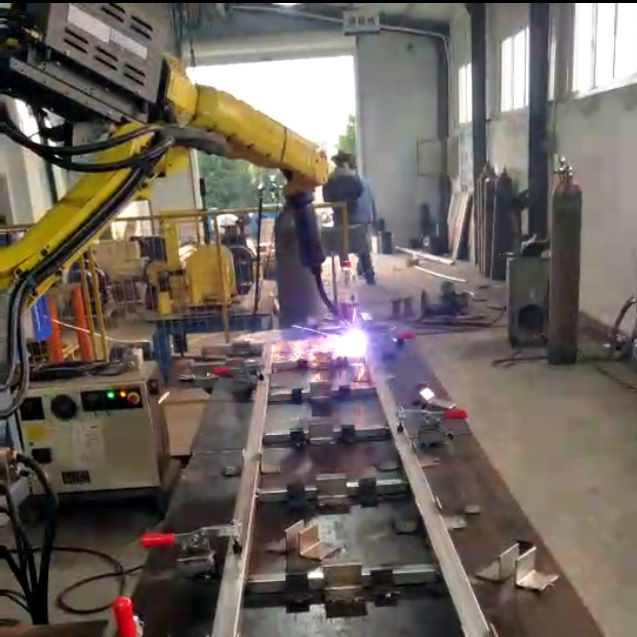
機器人焊接護欄
 發(fā)聯(lián)系信
發(fā)聯(lián)系信聯(lián)系信息
- 邵經(jīng)理
- 電話:
0519-88370668,88770167 - 傳真:0519-88770167
- 地址:江蘇省常州市武進橫林迎賓路129號
- 產(chǎn)品詳情
海寶公司導航頁:ABB機器人發(fā)那科機器人 OTC機器人安川機器人

焊接焊接機器人技術性能特點
1、主體結(jié)構日趨緊湊化,大多采用慣性小、相對作用范圍大的多關節(jié)型。
首先分析自由度數(shù)問題,目前的弧焊焊接機器人至少5個自由度才能較好地完成一般工件焊接加工,而考慮到加工對象可能要求完成一條閉合空間曲線或多道空間曲線焊縫的焊接,沒有6個自由度是很難保證焊槍始終有合適的姿勢來滿足焊接工藝要求的,而且重要關節(jié)作用范圍越大,對于通過姿態(tài)控制來達到工藝要求就越有利。
其次分析一下最大負荷能力問題,負荷小可使上臂和手腕容易做得小巧靈活,但機械手必須握托焊槍,支撐用于自動定位,焊縫跟蹤,焊接質(zhì)量檢測等傳感器,要求增大負荷能力是必然的。
2、控制系統(tǒng)功能與電焊機及焊接工藝相匹配
焊接機器人控制的研究已成為自動控制理論界的熱門課題,除了研究高速,高精度軌跡控制外。各種基于傳感器信息的依從控制也是大家所關注的,因為焊接機器人動力學模型非常復雜,所以目前的焊接機器人控制器多數(shù)還是基于運動學模型的控制器。
焊接機器人計算機控制系統(tǒng)基本可以分為兩大類;一類是利用現(xiàn)成的小型機或微型機,其操作系統(tǒng)具有通用性,但中斷功能和實時控制性能差,成本較高、體積較大。嚴格地說,這種控制系統(tǒng)的焊接機器人主要適合演示,試驗制技術有較大發(fā)展,例如需要有根據(jù)視覺、聽覺、力覺等各種傳感器對外部環(huán)境的認識進行理解室研究;第二類是根據(jù)焊接機器人的動作和生產(chǎn)工藝要求而專門設計的微型機、結(jié)構緊湊、實時監(jiān)控、中斷功能強,可靠性高、成本較低,目前國外工業(yè)焊接機器人控制系統(tǒng)多屬此類、硬軟件技術交叉發(fā)展,有些硬件功能由軟件去實現(xiàn),而大量的控制軟件被固化。這種專用LSI的研究把多CPU并行處理結(jié)構制作在一個芯片上,形成一種焊接機器人控制系統(tǒng)特殊結(jié)構形式是焊接焊接機器人控制技術發(fā)展的一個重要動向。
焊接機器人已經(jīng)開始從特定環(huán)境下的固定工作方式走向移動工作方式,進而開始從特定構造環(huán)境走向自然環(huán)境,這就要求傳感技術和控、推理、判斷并自行決定其行動的功能的自動控制系統(tǒng),也就是說自適應控制技術與智能技術正在迅速發(fā)展是焊接焊接機器人控制技術又一個重要發(fā)展動向。
當然,我們在設計焊接機器人控制系統(tǒng)時既要考慮到國際上的重要發(fā)展動向又要考慮國內(nèi)的實際條件,焊接焊接機器人控制系統(tǒng)是配合電焊機及其輔助設備為完成特定或通用焊接工藝服務的,這就要求焊接機器人硬軟件設計者與焊機及焊接工藝的研制者相互合作或集二者于一身。
3、電伺服是目前公認的較好驅(qū)動方式
電伺服驅(qū)動的焊接機器人控制系統(tǒng)能耗小、可靠性較高,位置控制較容易實現(xiàn)。伺服控制系統(tǒng)包括電流反饋、速度反饋及位置反饋等三閉環(huán)系統(tǒng)。利用軟件進行加、減速度控制,所以無論焊槍處于任何速度時其起動和停止都十分迅速和平穩(wěn),這一特性對滿足焊接工藝要求,保證焊接質(zhì)量是至關重要的。
4、提供用戶語言,使用方便
焊接焊接機器人像其它計算機系統(tǒng)一樣應該或已經(jīng)配備用戶語言,用戶只要采用其功能相應的縮寫符號進行操作和編程,簡單的的幾段程序或按一次功能鍵就可實現(xiàn)某些焊接作業(yè)或完成某些程序修改、很容易記憶和掌握,無須用戶去掌握焊接焊接機器人本身的深奧知識。
以上就是焊接機器人技術性能特點。